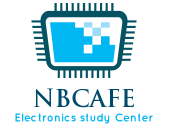

To understand over damped, under damped and Critical damped in control system, Let we take the closed loop transfer function in generic form and analysis that to find out different condition Over damped, underdamped and Critical damped in control system.
Now we know that the transient response of any system depends on the poles of the transfer function T(s). And as we know that the roots of the denominator polynomial in s of T(s) are the poles of the transfer function.
So in our case the denominator polynomial of T(s), is
![]()
is known as the characteristic polynomial of the system and D(s) = 0 is known as the characteristic equation of the system.
So The poles of T( s), or, the roots of the characteristic equation we can get by

Where is known as the damped natural frequency of the system.
Now If δ > 1, the two roots s1 and s2 are real and we have an over damped system.
If δ = 1, the system is known as a critically damped system.
The more common case of 0 < 1 is known as the under damped system.
Now in billow we can see the Locus of the roots of the characteristic equation for different condition for value of δ.

Now if we go for step responds of different second order systems then we can see
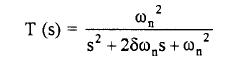
Step response of an under damped second order system.
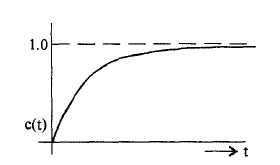
Step response of a critically damped second order system.
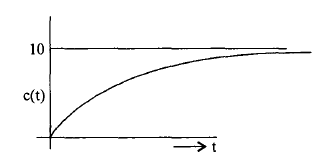
Step response of an over damped second order system.
 Hope this above discussion on Over damped, under damped and Critical damped in control system may clear your concept on what is Over damped, under damped and Critical damped in control system actually are ?
Hope this above discussion on Over damped, under damped and Critical damped in control system may clear your concept on what is Over damped, under damped and Critical damped in control system actually are ?