
If we want time domain specifications of in control system , the performance of a system in time domain is usually evaluated in terms of the following qualities.
- How fast it is able to respond to the input.
- How fast it is reaching the desired output,
- What is the error between the desired output and the actual output, once the transients die down and steady state is achieved,
- Does it oscillate around the desired value, and
- Is the output continuously increasing with time or is it bounded.
- Our system is Stable or not?
Now to get our answer of all question of time domain specifications of in control system, we should go with the step response of a typical under damped second order system is plotted in below.

- Delay time td: It is the time required for the response to reach 50% of the steady state value for the first time
- Rise time tr: It is the time required for the response to reach 100% of the steady state value for under damped systems. However, for over damped systems, it is taken as the time required for the response to rise from 10% to 90% of the steady state value. Generally the formula of equating Rise time

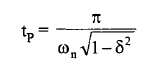
- Peak time tp: It is the time required for the response to reach the maximum or Peak value of the response.
- Peak overshoot M : It is defined as the difference between the peak value of the response and the steady state value. It is usually expressed in percent of the steady state value. If the time for the peak is tp’ percent peak overshoot is given by,

5.Settling time ts : It is the time required for the response to reach and remain within a specified tolerance limits (usually ± 2% or ± 5%) around the steady state value.
- Steady state error ess : It is the error between the desired output and the actual output as t ~ 00 or under steady state conditions. The desired output is given by the reference input r (t) and c(t).